Two-wheel, Mass-efficient Robot

ME 104: Mechanical Systems Design
Spring 2023
Skills: CAD, Rapid Prototyping, Mass-efficient Design, Motors, Gear Efficiency Design, FBDs, Project Management
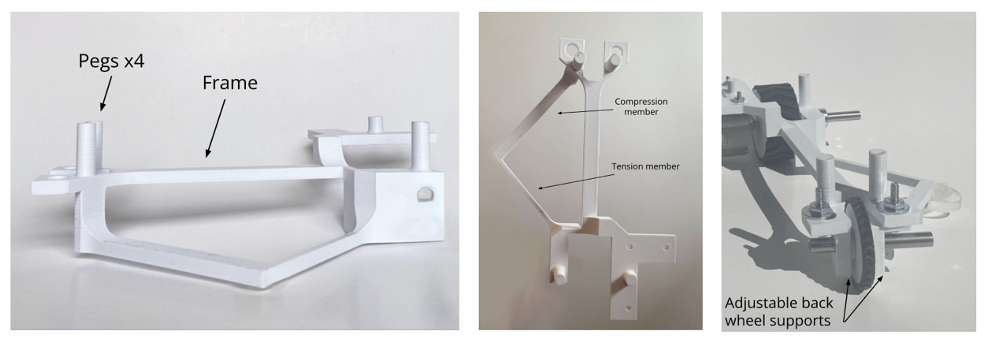
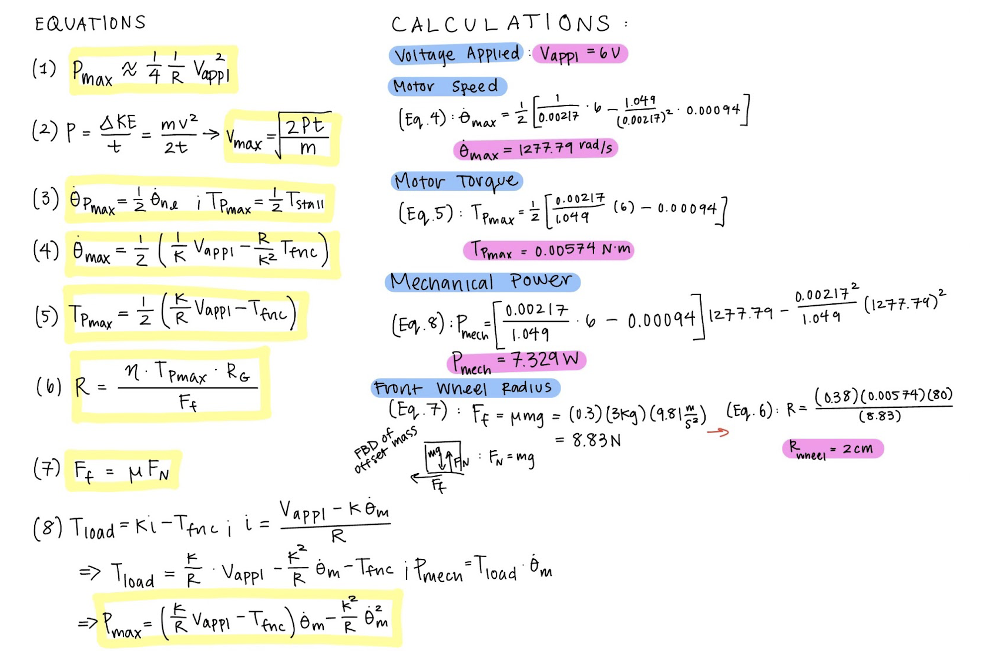
Objective: Our task was to drag a 3 kg mass 1 meter forward with the mass offset to the right by 0.05 meters as fast as possible.
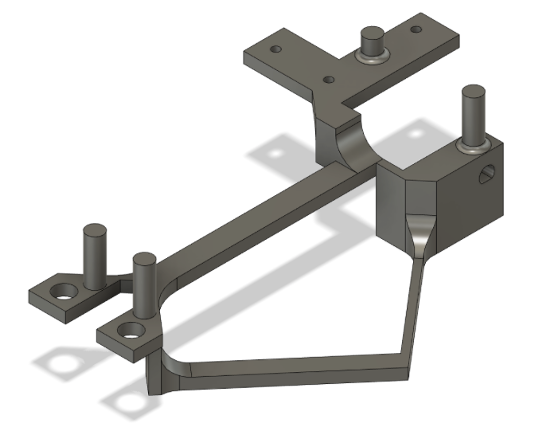
Outcome: We designed a two-wheel design, minimized the friction caused by the mass, and calculated the design and mass-efficiency needed to perform the task.
Requirements & Implementation
| Engineering Requirement | Design Implementation |
|---|---|
| Mass-efficient |
|
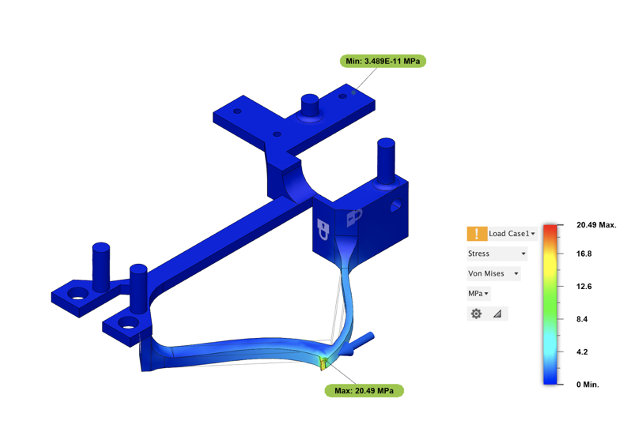
| Able to support considerable external load |
|
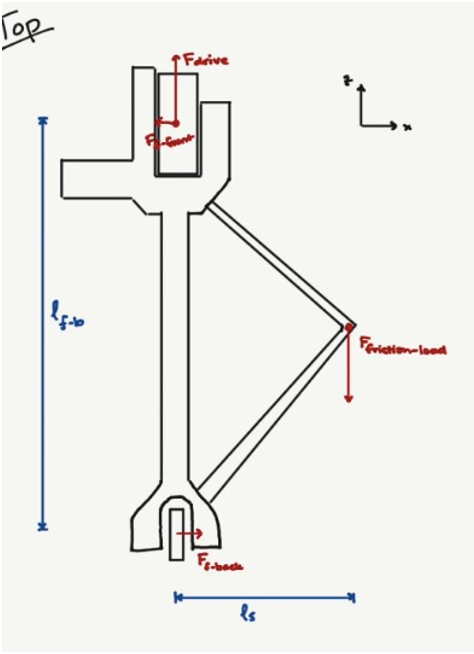
| Maximize the horizontal static friction force from the wheels to create optimal counter moment with the smallest possible counterweight |
|
| Design replicable in FBD |
|
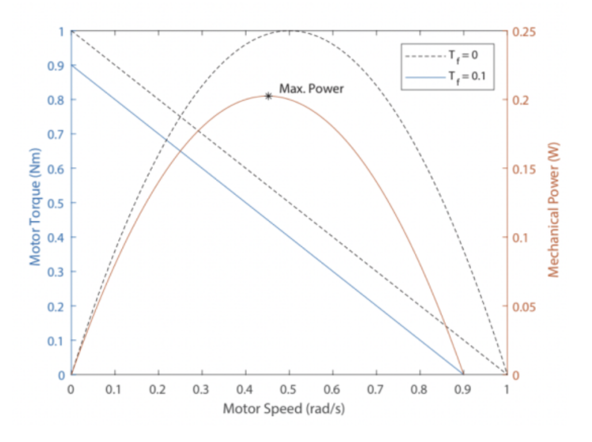
| Optimize speed |
|
| Minimal power loss |
|
| Factor of Safety = 1.5 |
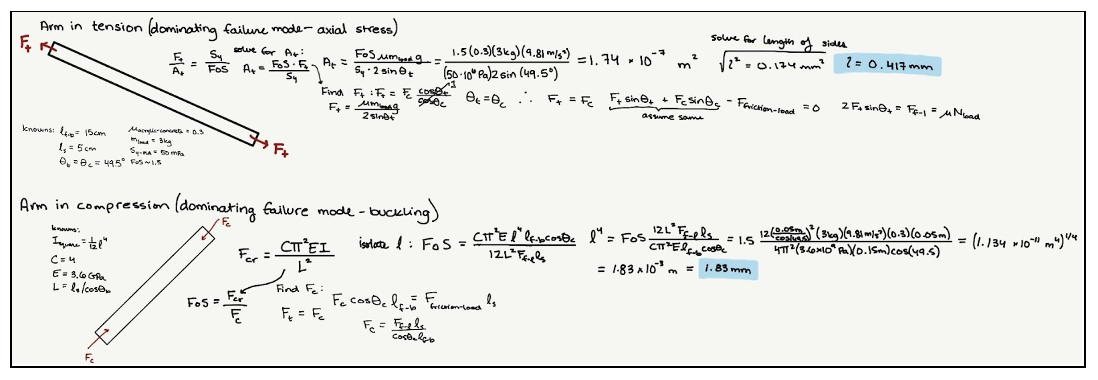
|