Mechatronic SlackBot
ME 210: Mechatronics
Winter 2024
Skills: Mechanical, Electrical, and Software Integration, CAD, Microcontroller Programming (Arduino IDE), Circuit Design, Communication, Project Management, Troubleshooting
Mechanical
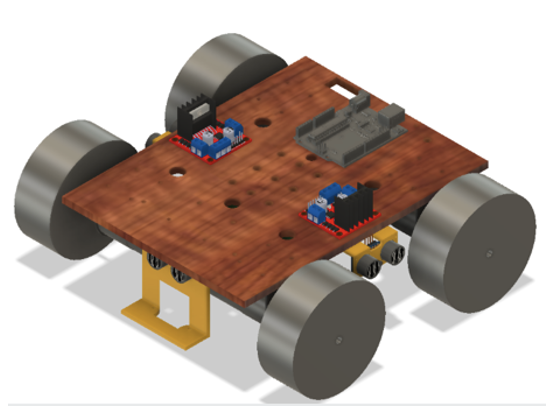
Drive Base
| Engineering Requirement | Design Implementation |
|---|---|
| Robot able to be precisely at the corners of start zone and scoring zone |
|
| Ease of troubleshooting |
|
| High agility and maneuverability |
|
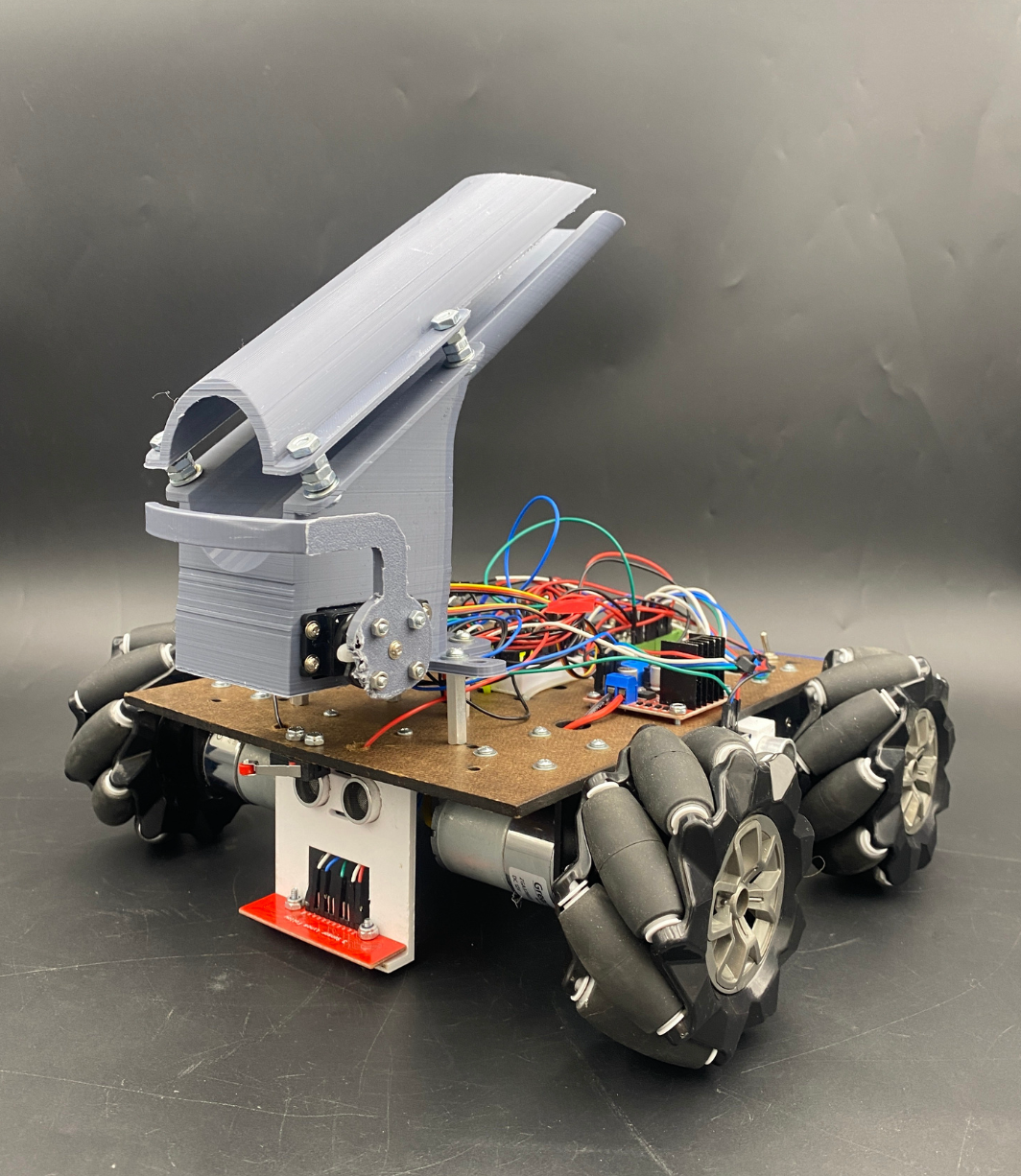
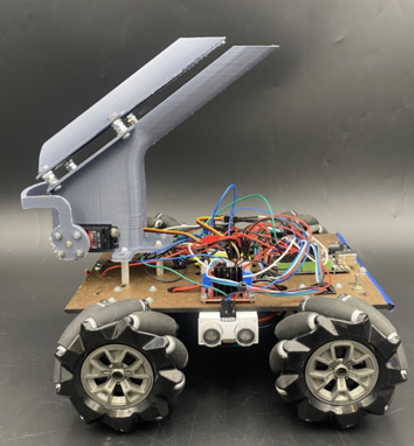
Dart Delivery System
| Engineering Requirement | Design Implementation |
|---|---|
| Lightweight to prevent additional moments and maximize speed and controllability |
|
| Simple software incorporation with use of only one Arduino pin for function |
|
| Simplicity of dumping mechanism, while keeping balls in mechanism during entire run |
|